


Cù u sviluppu di l'industria di e-commerce, u mercatu richiede una distribuzione più veloce è una veloce logistica. À u listessu tempu, l'aumentu di i prezzi di u travagliu rende u valore di u sistema di "beni à e persone" rivalutatu. U mercatu gradualmente trova chì u sistema di "beni à e persone" pò alleviate a pressione di magazzinu è logistica. Finu a ora, ci sò stati novi cambiamenti in u prucessu di l'automatizazione di u magazzinu: da u magazzinu manuale tradiziunale à u magazzinu meccanizatu cù cinture trasportatori, veiculi di trasportu, etc., à u magazzinu automaticu integratu. Oghje, l'applicazione di l'intelligenza artificiale è l'algoritmi hè ufficialmente intrutu in una nova tappa di l'automatizazione di u magazzinu. Hercules Hegerls sapi bè chì a custruzione di magazzini automatizati richiede l'integrazione di diversi equipaghji è tecnulugia di logistica. Recentemente, u sistema kubao sviluppatu da hegerls mostra a funzione di docking senza saldatura da a trasmissione à u almacenamentu à a classificazione in u scenariu di magazzinu. À u listessu tempu, a perfetta cooperazione trà u sistema kubao è u bracciu di u robot pò ancu rende più visibili l'abilità di integrazione di u sistema kubao. Allora chì hè un manipulatore d'almacenamiento senza pilotu cumplettamente automaticu? Chì tipu di pusizioni dominanti occupa in u almacenamentu di merchenzie? 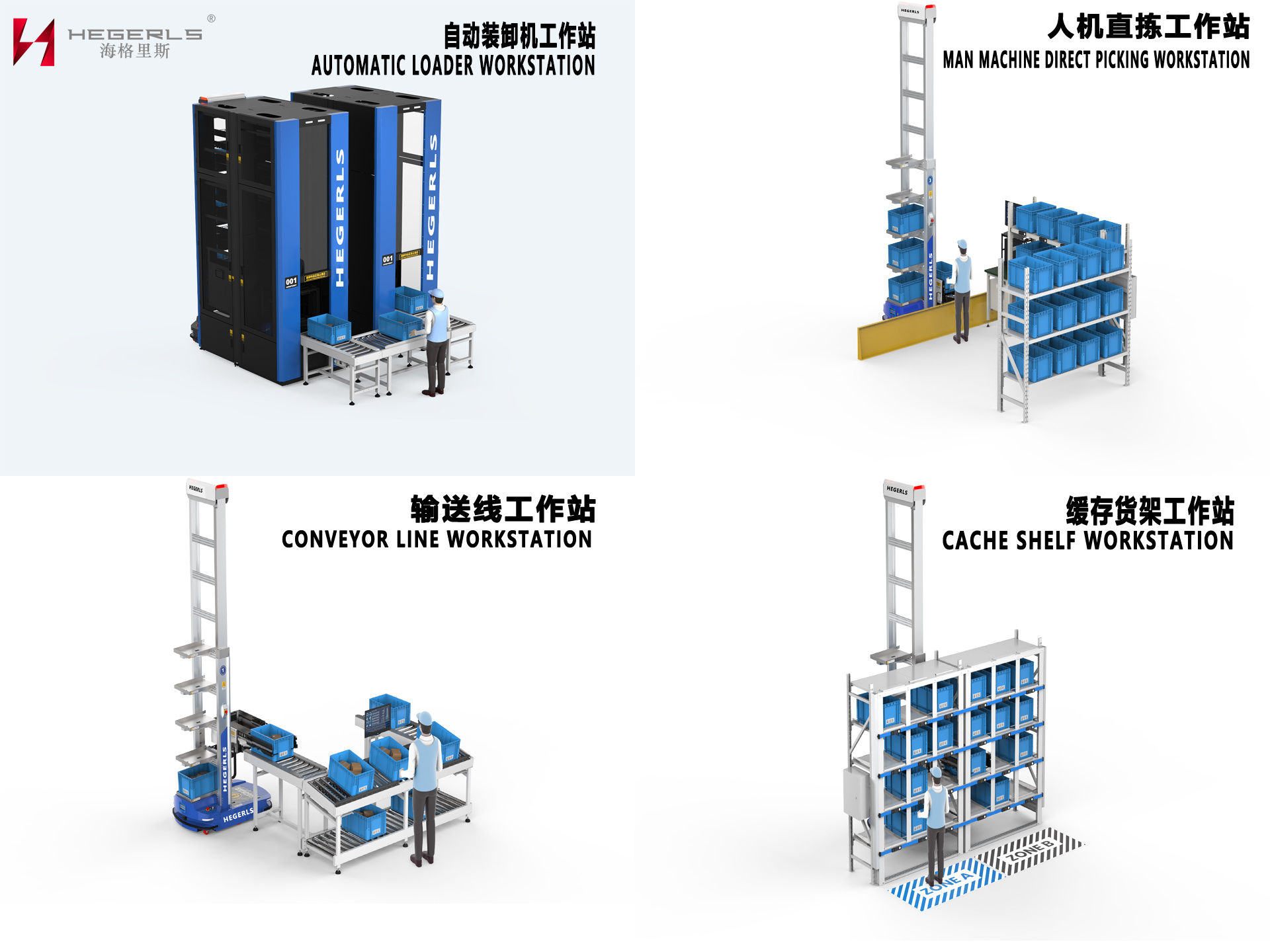 Hercules Hegels hà scavatu in profondità in i punti di dolore di l'utilizatori, hà capitu i novi bisogni di u mercatu, è hà sviluppatu continuamente suluzioni innovative adattate per diversi scenarii. In quantu à l'interazzione umanu-urdinatore, hagerls hà a so propria cunniscenza unica, è hà cuncepitu parechji modi è schemi di interazzione umanu-urdinatore, cumprese a stazione di travagliu di caricatore automaticu, a stazione di travagliu di ordinazione diretta umanu-urdinatore, a stazione di travagliu di linea di trasportatore, a stazione di travagliu di cache è a stazione di travagliu manipulatore. . A classificazione specifica hè a siguenti: Prima, stazione di travagliu di cugliera diretta omu-macchina In a stazione di travagliu di sorte diretta di l'omu-macchina, l'operatore pò sorte direttamente nantu à a cestera di a macchina, è a classificazione pò esse cumpletata solu cunfigurà una stazione di travagliu è una pistola di scanning. Siconda, stazione di travagliu di linea di trasmissione U robot cunnetta cù a linea di trasportu. U robot mette a scatula di materiale nantu à a cesta nantu à a linea di trasportu, è a linea di trasportu manda a scatula di materiale à e persone davanti à elli. A ghjente sceglie direttamente in a scatula di materiale, chì migliurà assai u cunfortu di scelta di l'operatore è evita i prublemi di sicurezza. Terzu, a stazione di travagliu di cache shelf U robot mette a scatula di materiale nantu à u scaffale di u cache, è a ghjente piglia in u scaffale. I robots sò liberati è vanu, liberando l'efficienza. Quartu, stazione di travagliu di caricatore automaticu In ordine per dà u ghjocu pienu à a sinergia efficienza umanu-informatica, Haggis Hegerls hà inventatu a macchina automatica di carica è scaricamentu, chì una volta subverted u modu di merchenzie à l'interazzione persone. Cumminatu cù e caratteristiche efficienti di manipolazione di multi container di kubao, hà realizatu a carica è u scaricamentu di più containeri, è hà migliuratu assai l'efficienza di magazzinu è magazzinu. A macchina automatica di carica è scaricamentu hè apposta per u sistema di robot di almacenamentu di scatula, innovendu ancu u modu di interazzione trà e merchenzie è e persone, arricchendu i tipi di stazioni di travagliu in u sistema di magazzinu, è migliurà l'efficienza di l'operazioni di magazzinu.
Hercules Hegels hà scavatu in profondità in i punti di dolore di l'utilizatori, hà capitu i novi bisogni di u mercatu, è hà sviluppatu continuamente suluzioni innovative adattate per diversi scenarii. In quantu à l'interazzione umanu-urdinatore, hagerls hà a so propria cunniscenza unica, è hà cuncepitu parechji modi è schemi di interazzione umanu-urdinatore, cumprese a stazione di travagliu di caricatore automaticu, a stazione di travagliu di ordinazione diretta umanu-urdinatore, a stazione di travagliu di linea di trasportatore, a stazione di travagliu di cache è a stazione di travagliu manipulatore. . A classificazione specifica hè a siguenti: Prima, stazione di travagliu di cugliera diretta omu-macchina In a stazione di travagliu di sorte diretta di l'omu-macchina, l'operatore pò sorte direttamente nantu à a cestera di a macchina, è a classificazione pò esse cumpletata solu cunfigurà una stazione di travagliu è una pistola di scanning. Siconda, stazione di travagliu di linea di trasmissione U robot cunnetta cù a linea di trasportu. U robot mette a scatula di materiale nantu à a cesta nantu à a linea di trasportu, è a linea di trasportu manda a scatula di materiale à e persone davanti à elli. A ghjente sceglie direttamente in a scatula di materiale, chì migliurà assai u cunfortu di scelta di l'operatore è evita i prublemi di sicurezza. Terzu, a stazione di travagliu di cache shelf U robot mette a scatula di materiale nantu à u scaffale di u cache, è a ghjente piglia in u scaffale. I robots sò liberati è vanu, liberando l'efficienza. Quartu, stazione di travagliu di caricatore automaticu In ordine per dà u ghjocu pienu à a sinergia efficienza umanu-informatica, Haggis Hegerls hà inventatu a macchina automatica di carica è scaricamentu, chì una volta subverted u modu di merchenzie à l'interazzione persone. Cumminatu cù e caratteristiche efficienti di manipolazione di multi container di kubao, hà realizatu a carica è u scaricamentu di più containeri, è hà migliuratu assai l'efficienza di magazzinu è magazzinu. A macchina automatica di carica è scaricamentu hè apposta per u sistema di robot di almacenamentu di scatula, innovendu ancu u modu di interazzione trà e merchenzie è e persone, arricchendu i tipi di stazioni di travagliu in u sistema di magazzinu, è migliurà l'efficienza di l'operazioni di magazzinu.

In a tappa più tardi, Hegerls hà ancu sviluppatu u manipulatore di Hegerls, vale à dì a stazione di travagliu di manipulatore di almacenamentu senza equipaggiu completamente automaticu di Hegerls, chì hè principalmente realizatu da u manipulatore invece di manualmente, docking with the conveyor line workstation o workstation di caricatore automaticu. A linea di trasportu o a macchina automatica di carica è scaricamentu hè cunnessa cù i robot di a serie kubao per trasmette automaticamente e scatuli di materiale scaricati o i scatuli di materiale chì deve esse carricati. U bracciu miccanicu rimpiazza i travagliadori per sorte i merchenzie d'ordine, è rializeghja u prucessu di magazzinu senza equipatu pienu autumàticu. Havi i vantaghji di l'automatizazione intelligente, u costu di u travagliu zero, u magazzinu è u magazzinu efficiente. Kubao rializeghja l'almacenamiento è a manipulazione intelligente in l'area di u reservoir, l'accoppiamentu di u bracciu meccanicu, a classificazione intelligente di picculi merchenzie da u bracciu meccanicu, è u prucessu di consegna è magazzinu hè cumpletu da a linea di trasportatore. U prucessu di classificazione di a piattaforma di operazione manuale hè omessa, è tuttu u prucessu di operazione senza equipaggiu hè applicabile à una varietà di scenarii d'applicazione, cumprese l'arrivu di merchenzie è a fabricazione di produzzione. Scenariu applicabile: hè particularmente applicabile à u scenariu di scelta di l'articuli di vendita di supermercati.


Caratteristiche funzionali di a stazione di travagliu di manipulatore di almacenamentu senza equipaggiu completamente automaticu di hagerls Liberate u travagliu - realizà un magazzinu cumplettamente automaticu è senza equipaggiu, rimpiazzà i travagliadori per sorte e merchenzie, è realizà un magazzinu è un magazzinu cumplettamente automatizatu; Classificazione intelligente - u sistema di piattaforma di gestione intelligente haiq si cunnetta senza saldatura cù u sistema di cuntrollu di movimentu di u manipulatore, è manda direttamente struzzioni per guidà u manipulatore per sorte e merchenzie; Docking flessibile - docking cù robot kubao, linee di trasportu, scaffali di cache o macchine automatiche di carica è scaricamentu per risponde à i bisogni di diversi scenarii di cummerciale; Magazzinu è uscita efficiente - ogni robot porta 25-35 scatuli fora / ora + 25-35 scatuli in / ora, è l'efficienza di magazzinu è uscita pò ghjunghje sin'à 300 scatuli / ora.


Hagerls si focalizeghja nantu à a R & S è u disignu di u sistema di robot di magazzinu intelligente, è hè impegnatu à riduce i costi è aumentà l'efficienza per i clienti attraversu a tecnulugia di robot è l'algoritmu di intelligenza artificiale, in modu di creà un sistema di magazzinu intelligente efficiente, intelligente è flessibile. A ricunniscenza di u mercatu è di i clienti diventeranu a forza motrice per u prugressu cuntinuu di Hegels. Hagerls serà prufondamente impegnatu in l'innuvazione è a R & S, cuncintrau in a R & S è u disignu di u sistema di robot di almacenamentu intelligente. À u listessu tempu, svilupperà una gamma più larga di scenarii d'applicazione per risolve i punti di dolore di almacenamentu di i clienti è risponde à i bisogni di almacenamentu di i clienti. I robots è a tecnulugia di l'intelligenza artificiale stanu introduci in una età d'oru di u sviluppu, cù opportunità è sfide coexistenti. In u futuru, Hagerls aderiscerà à l'innuvazione tecnologica è i sviluppi, fucalizza nantu à a segmentazione di i robot di almacenamentu di scatula, è ottimisà gradualmente a matrice di u produttu è di a funzione basatu annantu à i punti di dolore di almacenamento di i clienti, in modu di guidà ulteriormente u sviluppu è u prugressu di a segmentazione. industria.
Tempu di posta: Jul-08-2022