



Ci sò parechji tippi di scaffali di almacenamentu in u magazzinu, è i metudi di almacenamentu è ricuperazione sò principarmenti divisi in e seguenti categurie, cumprese l'almacenamiento è a ricuperazione manuale, l'almacenamiento è a ricuperazione di carrelli elevatori, è l'almacenamiento è a ricuperazione automatica. Oghje, assai imprese volenu realizà u funziunamentu automaticu di magazzinu, cusì volenu aduprà scaffali di magazzini automatizati. Per esempiu, u rack di vittura in quattru vie hè un tipu di rack di almacenamiento automatizatu. Cumu entra è surtite a navetta à quattru direzioni AGV da u magazzinu? U magazzinu pisanti pianta di pruduzzioni di scaffali Haigris analizò.

Magazzinu di navetta à quattru direzioni
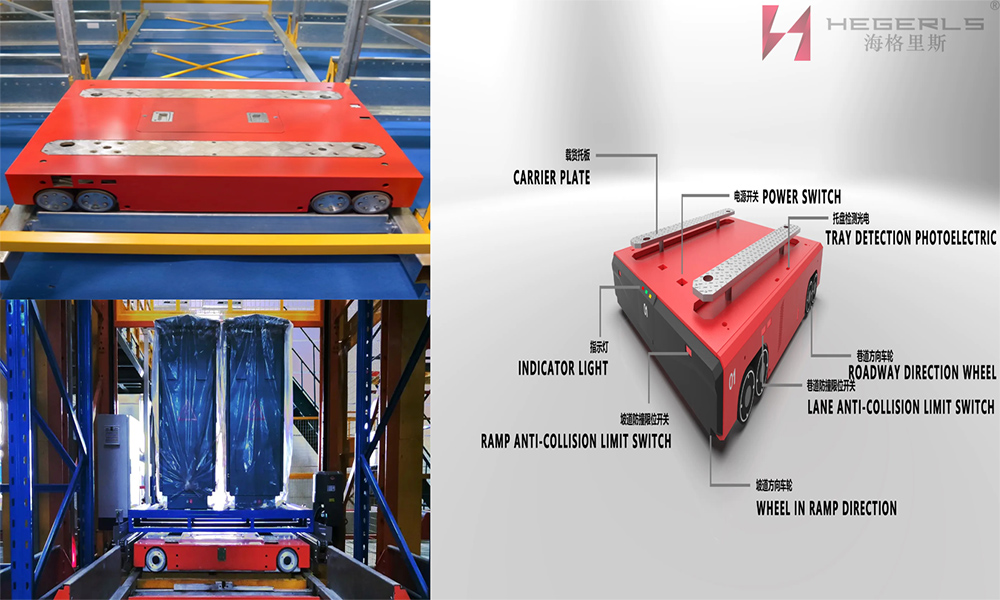
U vagone di navetta in quattru direzioni hè dotatu di 12 roti, chì ponu viaghjà in quattru direzzione longu u pianu di a pista è ghjunghje liberamente à qualsiasi spaziu di carica in u pianu di u magazzinu. A navetta à quattru direzioni hè guidata da e roti in i dui lati à u stessu tempu per assicurà chì a carrozzeria di a vittura ùn si devia micca durante u funziunamentu, è pò curriri alternativamente longu à i rails longitudinali è trasversali nantu à u scaffale tridimensionale.

À u listessu tempu, a navetta à quattru direzioni hè un dispositivu di manipulazione intelligente chì ùn pò micca solu marchjà longitudinalmente, ma ancu lateralmente. A navetta à quattru vie hà una alta flessibilità, pò cambià a strada di travagliu à vuluntà, è aghjustà a capacità di u sistema aumentendu o diminuendu u numeru di vitture navetta. In casu di necessariu, u valore di u piccu di u sistema pò esse rispostu da stabilisce u modu di pianificazione di a squadra di u veiculu di travagliu, risolve u collu di buttiglia di l'operazioni d'entrata è di uscita, è pò ancu esse rimpiazzatu cù l'altri, Quandu una navetta o un ascensore falla, altri navetta o elevatori ponu esse spediti attraversu u sistema di dispatch per cuntinuà à compie l'operazione senza affettà a capacità di u sistema. Stu dispusitivu hè adattatu sia per u almacenamentu di flussu bassu è di alta densità, sia per u almacenamentu di flussu altu è di alta densità. Puderà ottene più efficienza, costu è risorse.
Cumu entra è surtite a navetta à quattru direzioni AGV da u magazzinu?

1) Metudu di magazzinu
a) I tecnichi di a navetta intelligente di quattru vie prima accendenu a navetta intelligente di quattru vie è preparanu. L'intelligente navetta à quattru vie hè in standby;
b) Dopu avè cunfirmatu u locu di cugliera di a navetta intelligente à quattru vie, WCS hà da pianificà a strada di guida secondu u locu attuale è u locu di destinazione di a navetta intelligente à quattru direzioni, è dopu u persunale distribuirà merchenzie à u quadru intelligente. navetta attraversu WCS;
c) L'intelligente navetta à quattru vie principia à fà u compitu di consegna secondu u cumandamentu di u compitu ricevutu;
d) Nantu à a pista di cruciamentu, a navetta intelligente à quattru vie viaghja in u modu di spustamentu attraversu a distanza attuale. Durante u prucessu di guida, scansa continuamente e piste chì passanu a parte bassa di u corpu di u veiculu. Ogni posizione di traversata passa, ghjudica è calibre a distanza chì viaghja scannendu e piste. Quandu hè vicinu à a destinazione, sintonizza finemente a pusizione di parcheghju attraversu u sensoru laser laterale per ottene un posizionamentu precisu di a pusizione di parcheghju;
e) In u subcanale, a navetta intelligente di quattru vie pò scansà u riflettore di u specchiu di calibrazione laterale è a croce, ghjudicà è verificate a distanza di guida scannendu a pusizione di u puntu, è ottene un cuntrollu di pusizioni precisu in u canali sottu per ghjunghje à u destinazione;
f) Quandu a navetta intelligente à quattru vie ghjunghje à a pusizione di scelta selezziunata, u pallet cade, i merchenzie sò posti nantu à u scaffale, è u sistema WCS hè notificatu di a fine di u compitu di consegna;
g) A navetta intelligente à quattru direzioni cuntinueghja à riceve struzzioni di u travagliu o torna à l'area di standby.
2) Metudu di consegna
a) I tecnichi di a navetta intelligente di quattru vie prima accendenu a navetta intelligente di quattru vie è preparanu. L'intelligente navetta à quattru vie hè in standby;
b) Dopu avè cunfirmatu u locu di cugliera di a navetta intelligente à quattru direzioni, WCS hà da pianificà a strada di guida secondu u locu attuale è u locu di destinazione di a navetta intelligente à quattru vie, è dopu u persunale mandarà u compitu di scelta à i quattru intelligenti. -navette via WCS;
c) L'intelligente navetta à quattru vie principia à coglie e merchenzie secondu u cumandamentu di u compitu ricevutu;
d) Nantu à a pista di cruciamentu, a navetta intelligente à quattru vie viaghja in modu di spustamentu attraversu a distanza attuale. Durante u prucessu di guida, scansa continuamente e piste chì passanu a parte bassa di u corpu di u veiculu. Ogni pusizioni di traversata chì passa, ghjudicheghja è verifica a distanza chì viaghja scannendu e piste. Quandu si avvicina à a destinazione, sintonizza a pusizione di parcheghju attraversu u sensoru laser laterale per ottene un cuntrollu di pusizioni precisu è parcheghju;
e) In u subcanale, a vittura intelligente di navetta à quattru direzioni scanseghja a pista cruci è u riflettore di u specchiu di calibrazione laterale, ghjudica è calibrate a distanza di guida scannendu questi punti, è rializeghja u cuntrollu di pusizioni precise in u subcanale per ghjunghje à u destinazione. .
Tempu di post: 19-sep-2022